以机电学院塑机所2021年本科毕业生田野和刘俊杰为共同第一作者的研究论文”Peano-Hydraulically Amplified Self-Healing Electrostatic Actuators Based on a Novel Bilayer Polymer Shell for Enhanced Strain, Load, and Rotary Motion”在WILEY旗下的人工智能旗舰期刊Advanced Intelligent Systems上发表,两位同学的指导教师为塑机所吴大鸣教授和黄尧副教授,论文研究了具有复合外壳结构的HASEL人工肌肉的设计和制备。
HASEL致动器是一种近几年被发明的新型人工肌肉。它以高韧聚合物薄膜为外壳,外壳相对两面贴附电极,壳内充入抗电击穿的液体电介质。当为HASEL致动器施加工作电压后,它的电极会由于电场力的作用相互吸引,从而挤压壳内液体,传递液压能,使得致动器产生形变,模拟肌肉作用。它的组成结构简单,且动作模式与生物肌肉十分相似,并可根据结构改造实现各种复杂的运动方式,所以在软体机器人等方面具有巨大的应用潜力。
决定HASEL致动器性能的主要因素就在于其电极在工作时产生的电场力大小,电场力越大,致动器的性能也就越强。而决定电场力大小的重要因素之一就是致动器外壳的介电常数。常规的致动器外壳通常使用单一材料制成,这就造成了其外壳性能不全面的问题,如:较高介电常数的外壳抗电击穿性能差,无法承受更高的工作电压;较高抗电击穿性能的材料介电常数低,产生电场力的效率差。由此,改进HASEL致动器外壳的介电性能就成为了增强其性能的强有力方式,而研发一种新的双高介电性能聚合物材料需要耗费巨量的资源,很难实现,所以一种相对简单且高效的外壳改进方式可以为这种人工肌肉的研究提供很大帮助。
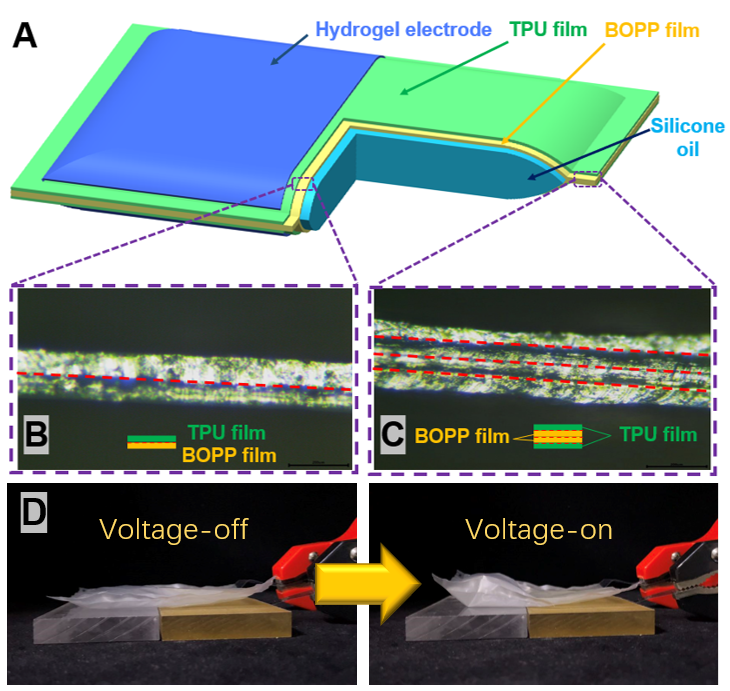
田野和刘俊杰在导师的指导下,开发出了一种创新性的具有复合外壳结构的HASEL致动器。相较于以BOPP外壳制成的传统致动器,新的复合外壳致动器产生的应变量在工作电压为5kV时提升了约164%,负载能力在6kV时提升了74.96%,最高可承受约350%自重的负载。并且这种新致动器的应变随电压变化更加线性,更易由电压输入控制其性能输出。由此,吴大鸣团队还制作了一个由这种致动器驱动的棘轮系统,通过该装置,可将致动器的线性输出转化为扭矩输出。由于HASEL致动器的柔性输出特性,所以可以有效的保护系统内各部件免受冲击损耗或脆性断裂,并可以通过对致动器的输入电压控制来控制棘轮系统的输出量,此类系统在小型仿生机器人或小型精密机构中有着很大的应用潜力。
论文以田野和刘俊杰为共同第一作者,北京化工大学吴大鸣教授、黄尧副教授和英国华威大学Chaoying Wan教授为共同通讯作者。论文在发表过程中得到了英国巴斯大学Chris Bowen教授、Min Pan教授以及北京化工大学武文杰老师的大力支持。
全文链接为:https://doi.org/10.1002/aisy.202100239